Product Center.
产品中心
单项设备电气控制方案说明
功能和特点介绍:
可编程控制器(简称PLC)吊杆控制系统利用高可靠的工业控制技术,将分布在不同地点的多个节点联系在一起,并通过一台控制主机作为中央控制器进行统一的监控和管理,从而形成一个集中式的控制系统。整个系统全部采用模块化结构,大大提高了系统的可靠性。同时,使用图形化用户界面作为人机对话界面,具有操作简单,运行可靠的特点。代表了舞台机械技术发展水平。
系统的主要功能有:
采用智能PLC控制吊杆的自由升降;
控制台采用MODBUS总线,实现高可靠性通信;
在线路行程上的任何位置都可设置上限值和下限值;
在线路行程上的任何位置都可设置单一自由定位值;
控制任何一个线路的上行、下行、定位和停止;
控制任何一个线路的上限到位、下限到位和定位点到位的停止;
可以在一场演出中设置任意个(超过100)场景的线路定位设计;
可以在一个场景中同时动作10道吊杆;(具体数量依现场实际情况而定)
在每个场景设计中,可以分别设置每个线路的不同的定位位置;
可以对已经设计好的场景内容进行修改;
在演出中,可以按照任意的场景顺序控制线路位置;
在线路的运行过程中,具有定位误差的自动学习和自动校正功能,定位误差小于1cm;

功能:定位、调速、紧急制动;单控、程控、场景配置;信息管理、故障诊断、故障报警;软件复位、硬件复位、极限复位等主控制台:自研(含手动备份系统),采用豪华台式控制台,定位精度+-5mm
采用智能PLC控制吊杆的自由升降;
控制台采用MODBUS总线,实现高可靠性通信;
在线路行程上的任何位置都可设置上限值和下限值;
在线路行程上的任何位置都可设置单一自由定位值;
控制任何一个线路的上行、下行、定位和停止;
控制任何一个线路的上限到位、下限到位和定位点到位的停止;
可以在一场演出中设置任意个(超过100)场景的线路定位设计;
可以在一个场景中同时动作10道吊杆;(具体数量依现场实际情况而定)
在每个场景设计中,可以分别设置每个线路的不同的定位位置;
可以对已经设计好的场景内容进行修改;
在演出中,可以按照任意的场景顺序控制线路位置;
在线路的运行过程中,具有定位误差的自动学习和自动校正功能,定位误差小于1cm
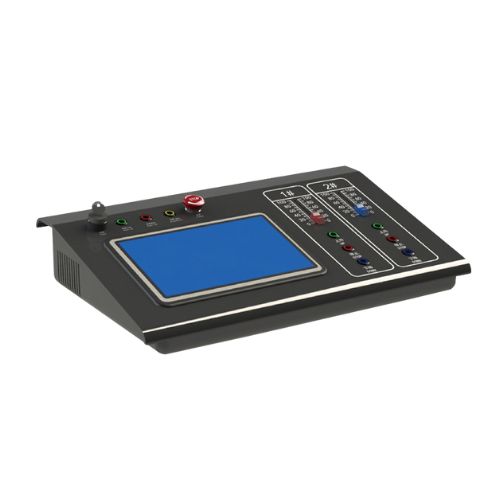
功能:定位、调速、紧急制动;单控、程控、场景配置;信息管理、故障诊断、故障报警;软件复位、硬件复位、极限复位等主控制台:自研(含手动备份系统),采用豪华台式控制台,定位精度+-5mm
采用智能PLC控制吊杆的自由升降;
控制台采用MODBUS总线,实现高可靠性通信;
在线路行程上的任何位置都可设置上限值和下限值;
在线路行程上的任何位置都可设置单一自由定位值;
控制任何一个线路的上行、下行、定位和停止;
控制任何一个线路的上限到位、下限到位和定位点到位的停止;
可以在一场演出中设置任意个(超过100)场景的线路定位设计;
可以在一个场景中同时动作10道吊杆;(具体数量依现场实际情况而定)
在每个场景设计中,可以分别设置每个线路的不同的定位位置;
可以对已经设计好的场景内容进行修改;
在演出中,可以按照任意的场景顺序控制线路位置;
在线路的运行过程中,具有定位误差的自动学习和自动校正功能,定位误差小于1cm

单项设备电气控制方案说明
功能和特点介绍:
可编程控制器(简称PLC)吊杆控制系统利用高可靠的工业控制技术,将分布在不同地点的多个节点联系在一起,并通过一台控制主机作为中央控制器进行统一的监控和管理,从而形成一个集中式的控制系统。整个系统全部采用模块化结构,大大提高了系统的可靠性。同时,使用图形化用户界面作为人机对话界面,具有操作简单,运行可靠的特点。代表了舞台机械的技术发展水平。
系统的主要功能有:
采用智能PLC控制吊杆的自由升降;
控制台采用MODBUS总线,实现高可靠性通信;
在线路行程上的任何位置都可设置上限值和下限值;
在线路行程上的任何位置都可设置单一自由定位值;
控制任何一个线路的上行、下行、定位和停止;
控制任何一个线路的上限到位、下限到位和定位点到位的停止;
可以在一场演出中设置任意个(超过100)场景的线路定位设计;
可以在一个场景中同时动作10道吊杆;(具体数量依现场实际情况而定)
在每个场景设计中,可以分别设置每个线路的不同的定位位置;
可以对已经设计好的场景内容进行修改;
在演出中,可以按照任意的场景顺序控制线路位置;
在线路的运行过程中,具有定位误差的自动学习和自动校正功能,定位误差小于1cm;